L’hybridation des groupes motopropulseurs est une étape importante vers une mobilité efficace et propre. L’un des principaux avantages des moteurs hybrides est la possibilité de déplacer le point de fonctionnement du moteur thermique vers des gammes à meilleur rendement et représentant des modes de conduite purement électriques. Ce déplacement du point de charge peut être encore optimisé sur la base des données d’itinéraire qui incluent la vitesse prévue du véhicule ainsi que la pente de la route, et est considéré comme étant à la pointe en matière de propulsion hybride moderne.
En combinaison avec le développement de fonctions de conduite prédictive et automatisée, d’autres potentiels peuvent être exploités. Le facteur clé d’une réduction effective des besoins en énergie dans des conditions réelles de conduite est une prévision précise de l’évolution future d’une situation de trafic. Cette prévision peut être basée sur une multitude de sources potentielles, telles que les données des capteurs, les cartes à haute résolution et la communication avec les véhicules, où toutes les données sont fusionnées dans un modèle environnemental complet.
Sur la base des informations de ce modèle, le guidage longitudinal du véhicule et la commande du groupe motopropulseur peuvent être optimisés. En collaboration avec l’Institute for Combustion Engines, FEV a développé une structure fonctionnelle capable d’utiliser une multitude de sources de données potentielles. Ceci crée un espace de solution pour l’optimisation prédictive du profil de vitesse. Ce profil de vitesse peut ensuite être utilisé afin d’optimiser le fonctionnement de la répartition du couple entre les composants hybrides.
La structure fonctionnelle a été intégrée dans un véhicule hybride prototype construit conjointement avec DENSO. Un algorithme de contrôle prédictif, robuste et modèle temps réel, est utilisé afin d’optimiser le guidage longitudinal du véhicule.
Le véhicule concept HYBex 3
Le véhicule HYBex 3 a été développé afin de déterminer l’impact d’un concept de transmission DHT économique sur la maniabilité du véhicule et de le tester en conditions réelles. Il a été développé conjointement avec DENSO AUTOMOTIVE Allemagne. Le véhicule de base est une MINI Cooper avec un moteur turbocompressé à trois cylindres de 100 kW. La transmission de série a été remplacée par la transmission hybride à examiner, qui a été spécialement développée à cette occasion.

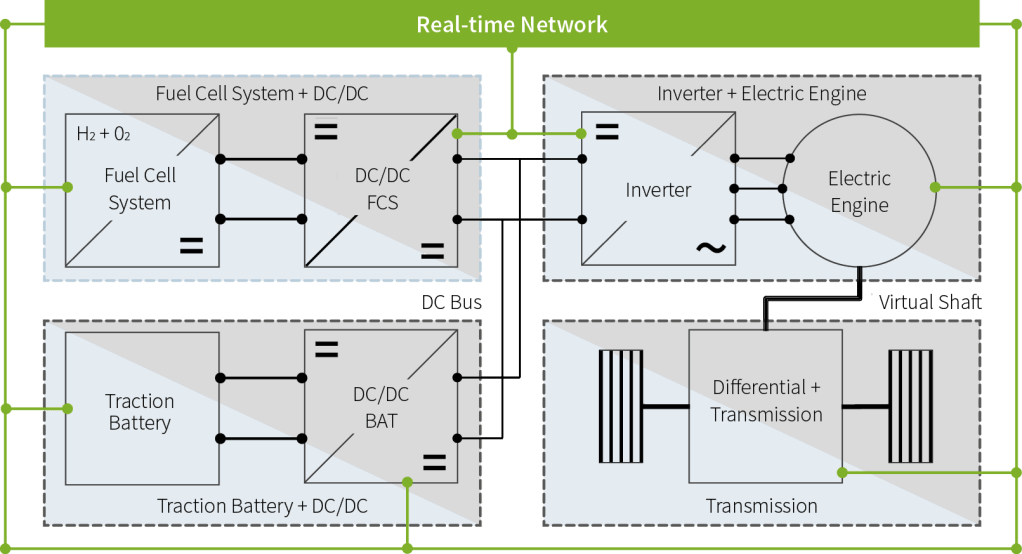
La topologie du groupe motopropulseur est équivalente à celle d’un hybride mixte équipé de deux moteurs électriques (EM) en configuration P2/P3. La machine P2 est située entre l’embrayage électro-hydraulique et le réducteur à engrenages droits à deux étages. Les éléments de synchronisation sont également actionnés électro-hydrauliquement. La machine P3 est positionnée à la sortie de transmission et a donc un rapport de transmission fixe à la roue.
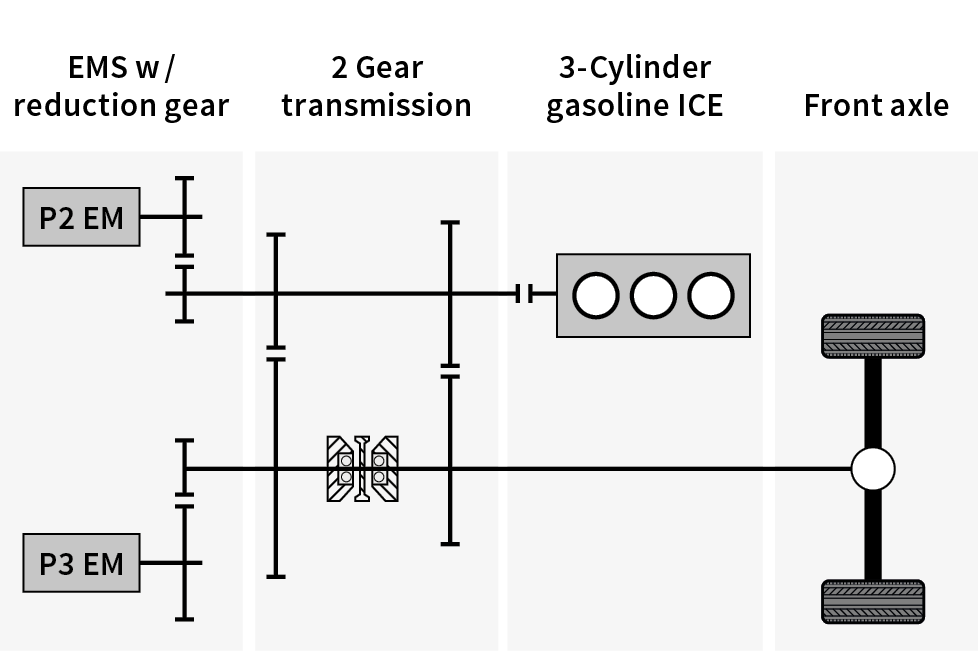
Différents modes de fonctionnement peuvent être représentés avec cette transmission DHT. Pour la conduite purement électrique, le moteur thermique est arrêté et l’embrayage est ouvert. Le moteur électrique P2 peut donc fonctionner dans les deux étages de transmission. En plus d’un couple de démarrage élevé en première, cela permet une vitesse maximale de 140 km/h en deuxième.
En mode hybride, la conduite en série ou en parallèle est possible. En fonctionnement parallèle, l’un des deux jeux de pignons est engagé. En mode de fonctionnement en série, la transmission est mise au point mort. Le moteur à combustion est alors exclusivement connecté au moteur électrique P2 tandis que le moteur électrique P3 actionne les roues. Tous les changements de vitesse sont entièrement synchronisés électriquement, de sorte que le limiteur de couple à friction peut rester fermé même en mode hybride. Le fonctionnement en série dans la plage des vitesses basses et le fonctionnement en parallèle à des vitesses plus élevées permettent une augmentation significative du niveau d’efficacité du système.
La stratégie d’exploitation prévoit le fonctionnement du moteur à combustion à très faible dynamique et la mise en œuvre de changements de charge rapides par la voie électrique. Les rapports de transmission permettent une réduction significative de la vitesse de rotation du moteur thermique, sans compromettre la dynamique globale de la chaîne cinématique. La stratégie d’exploitation a été optimisée par un plan d’expériences. Pour ce faire, les paramètres de la stratégie stop-start du moteur thermique ont été optimisés en même temps que les paramètres de la stratégie de charge de la batterie. Pour le paramétrage final, un compromis entre les profils des différents cycles de conduite a été sélectionné.
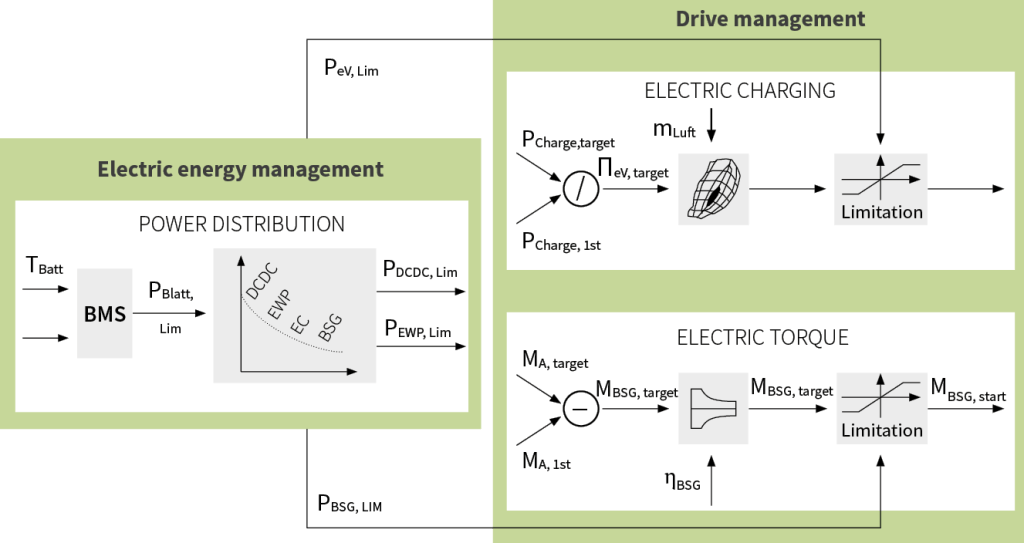
La répartition des couples des deux moteurs électriques, aussi bien en fonctionnement parallèle qu’en fonctionnement entièrement électrique, est déterminée par une optimisation en ligne brevetée par FEV. L’algorithme de recherche fait varier la distribution du couple jusqu’à ce que le cas optimal du point de vue énergétique soit trouvé. Ce faisant, les limites de batterie et les limites de puissance des moteurs électriques sont prises en compte dans la situation actuelle.
Fonctions prédictives
La structure fonctionnelle développée pour le contrôle dynamique longitudinal prédictif est conçue de telle sorte qu’une multitude de sources de données, de routines d’optimisation et de structures de groupe motopropulseur peuvent être représentées dans ladite structure fonctionnelle.
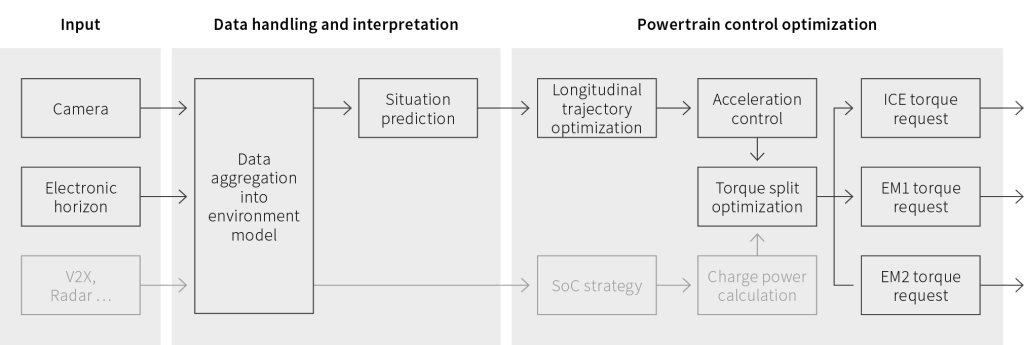
La première étape consiste à agréger et à fusionner les données disponibles en un modèle environnemental, suivi d’une prévision de l’état du trafic. Ceci permet d’optimiser le profil de vitesse. Sur cette base, un contrôle de l’accélération du véhicule est effectué. Le profil de vitesse planifié peut également être utilisé pour ajuster la stratégie de charge. Si la puissance de charge souhaitée est déterminée, la répartition du couple entre les composants du groupe motopropulseur est effectuée sur la base de cette puissance et du couple à la roue requis.
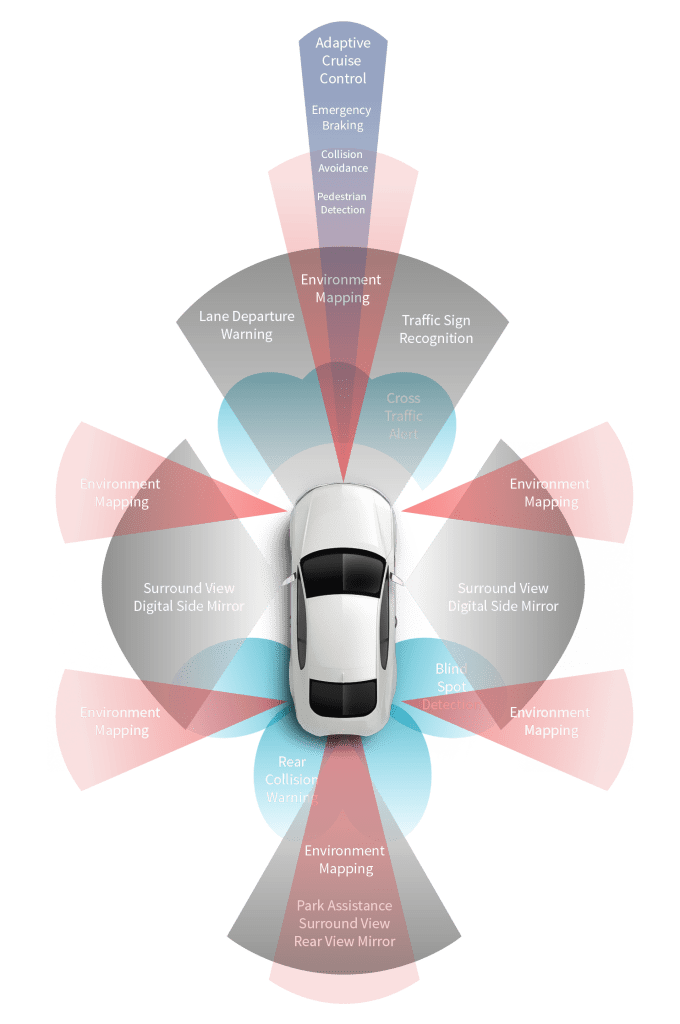
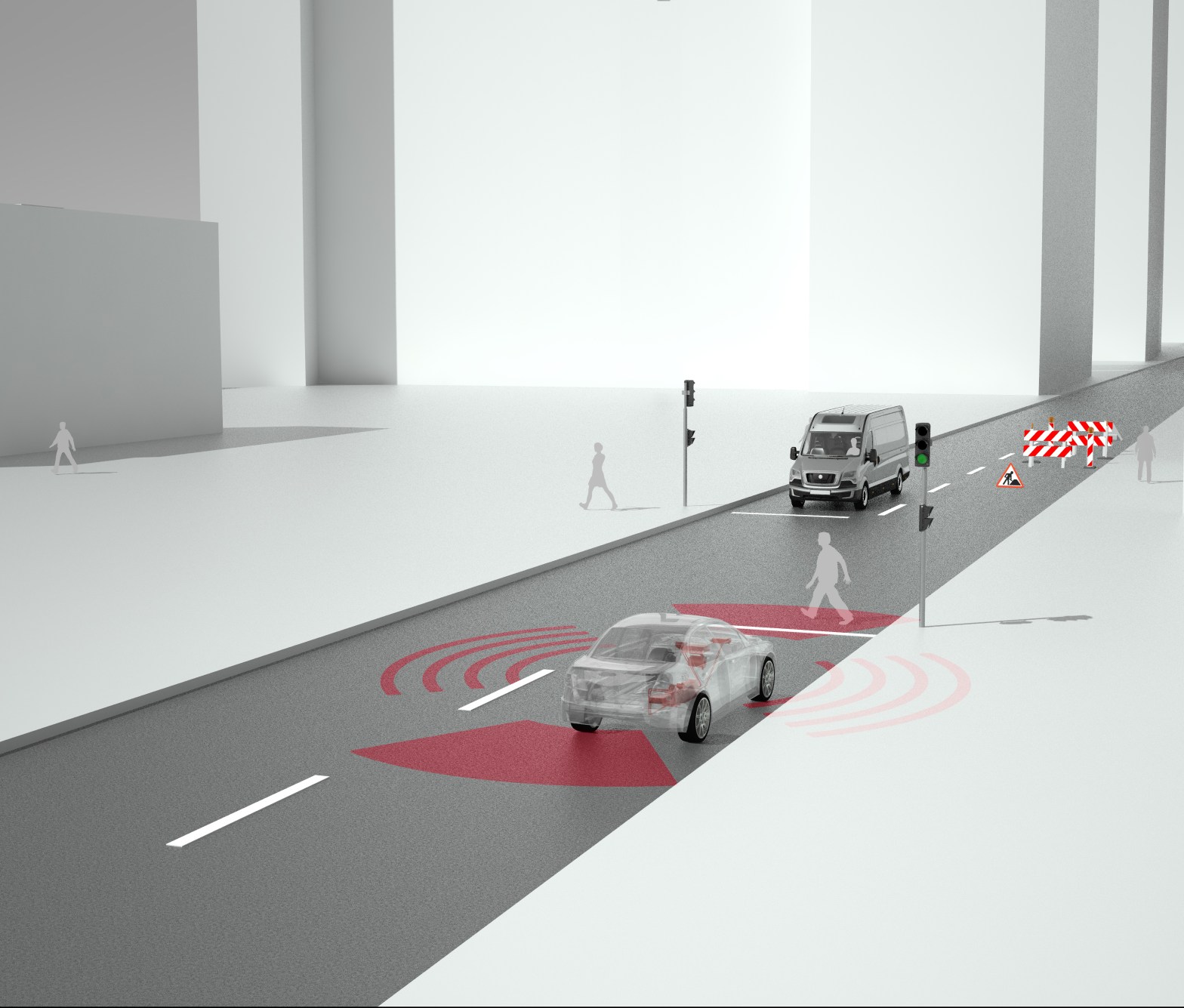
La prévision précise de la situation actuelle du trafic nécessite l’agrégation de toutes les données disponibles. Cela comprend, par exemple, les capteurs RADAR, les capteurs LIDAR ou les caméras optiques que les usagers de la route peuvent identifier à l’aide de techniques de reconnaissance des images. Habituellement, ces capteurs indiquent le type (voiture particulière, camion, piéton, etc.), les positions relatives et, potentiellement, la vitesse relative des objets détectés.
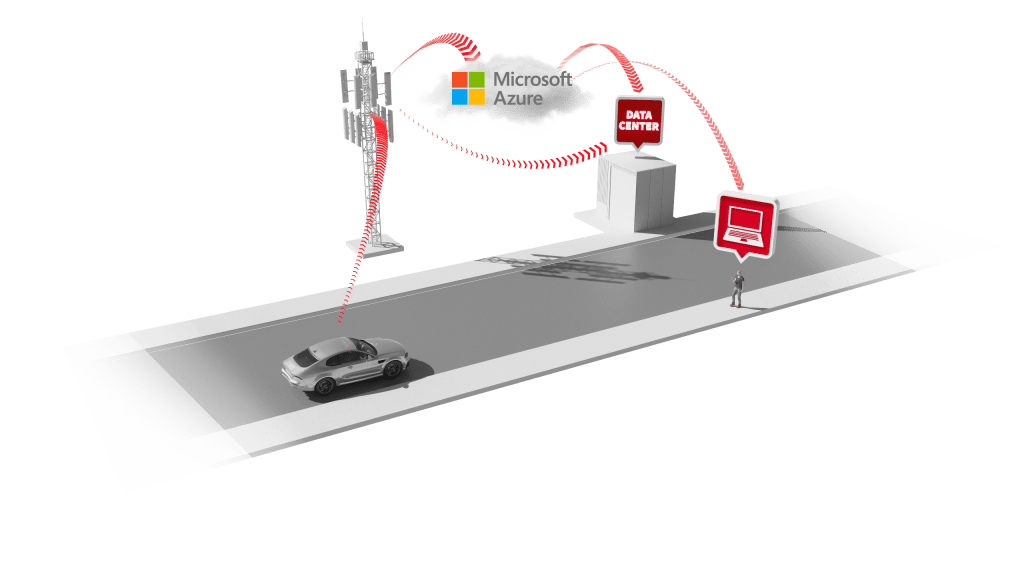
Des informations complémentaires peuvent être obtenues à partir des systèmes de navigation embarqués, qui indiquent les limitations de vitesse, les pentes et les courbes de la route ainsi que, éventuellement, les données d’intersection pour la trajectoire la plus probable du véhicule via un horizon électronique. Si le système de navigation est connecté à Internet, des données sur les vitesses moyennes le long de l’itinéraire prévu et sur les embouteillages peuvent être fournies.
Des données supplémentaires peuvent être obtenues grâce à la connexion future de véhicules utilisant la 5G ou ETSI ITS G5. Cette communication du véhicule (V2X) devrait inclure, entre autres, les positions, la direction et la vitesse des autres véhicules, ainsi que la disposition des intersections et l’état des systèmes de feux de circulation. La communication du véhicule peut donc fournir des données qui vont au-delà de l’horizon détectable par des capteurs embarqués.
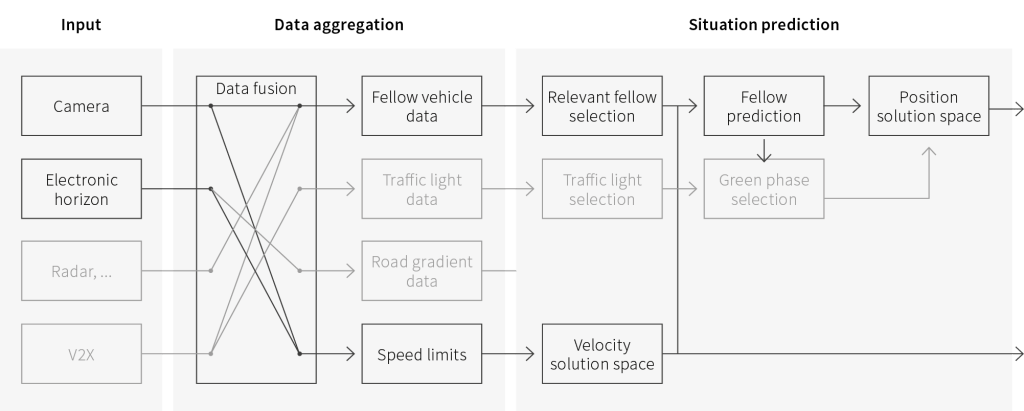
Étant donné qu’un même objet peut donc être détecté plusieurs fois par différentes sources de données, l’agrégation de données doit également inclure une fonctionnalité de fusion de données. Ceci est particulièrement avantageux pour les configurations matérielles avec différents types de capteurs, par exemple un capteur RADAR et un capteur caméra. Le capteur RADAR peut définir avec précision la distance et la position relative d’un véhicule qui précède, mais ne peut pas déterminer la position latérale du véhicule par rapport au marquage au sol. En revanche, le capteur de la caméra ne peut fournir que des estimations concernant la vitesse relative et la distance, mais peut déterminer avec précision si l’objet détecté est dans la même voie que le véhicule considéré. Après la fusion de plusieurs sources de données, une liste d’objets agrégée est créée, qui ne contient que des données valables et pertinentes pour tous les objets détectés et génère un modèle environnemental correspondant.
Avant de pouvoir optimiser la trajectoire du véhicule, il faut d’abord prévoir l’évolution de la situation actuelle. Cette prévision repose sur les objets pertinents fournis par le modèle environnemental. La première étape consiste à déterminer la limite de vitesse le long de l’horizon de prévision. En se basant sur cela et sur l’état actuel des véhicules détectés qui circulent devant, on peut prévoir la vitesse et la trajectoire de ces véhicules et leur position.
Sur cette base, un espace de solution est étalé dans lequel l’algorithme d’optimisation en aval peut fonctionner. La structure fonctionnelle développée par la FEV et l’Institute for Combustion Engines permet la mise en œuvre de différents algorithmes à cette fin. Selon les besoins, des approches simples, basées sur des règles, ainsi que des méthodes de contrôle prédictif de modèle ou de programmation dynamique discrète peuvent être représentées.
Application dans le véhicule
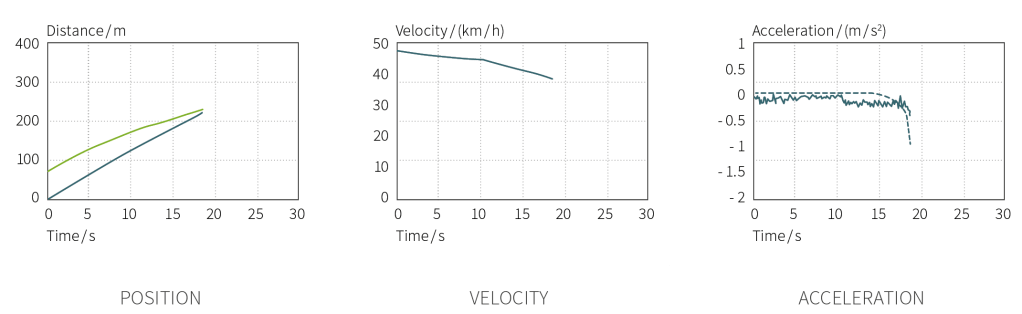
Pour tester la structure fonctionnelle, un modèle de commande prédictif (MPC) compatible temps réel a été implémentée dans l’unité de commande de prototypage rapide du véhicule concept HYBex 3 et différents scénarios de test ont été réalisés. Dans une première démonstration, la fonctionnalité et la compatibilité temps réel de ces scénarios pour un ajustement prédictif du véhicule concept HYBex 3 ont été prouvées. Avec une mise en œuvre efficace du MPC à l’aide de l’outil qpOASES, une optimisation de la courbe de vitesse pour un horizon de 10 s peut être réalisée en moins de 100 µs.
A l’avenir, la conception modulaire de la structure fonctionnelle pourra être utilisée pour étendre l’horizon de prévision du véhicule – par exemple, avec des feux de signalisation à l’horizon – ou pour représenter des fonctions de conduite prédictives et automatisées telles que le Predictive Cruise Control (PCC).
Merci d’avoir lu cet article. N’hésitez pas à commenter, liker ou partager, nos experts répondront à vos questions. Et bien entendu, nous vous attendons sur notre site !
A bientôt !
Article rédigé par Dr.-Ing. Georg Birmes, Birmes@fev.com ; Dr.-Ing. Rene Savelsberg, savelsberg@fev.com ; Marius Wegener, Prof. Dr.-Ing. Jakob Andert, Institute for Combustion Engines of RWTH Aachen University, Ulrich Schwarz, DENSO AUTOMOTIVE Deutschland GmbH