Si l’on considère le développement actuel des moteurs et les prévisions du marché, la technologie 48 V prend de plus en plus d’importance dans l’industrie automobile. Cette technologie est un élément important des stratégies d’électrification de nombreux constructeurs automobiles. Avec un effort technique modéré, il est possible de réduire à court terme les émissions de CO2 de la flotte de véhicules. Dans le même temps, l’électrification 48 V offre un potentiel important de réduction des émissions en conditions de conduite réelles (real driving emissions – RDE). Compte tenu des nombreuses fonctions, telles que le freinage récupératif, l’optimisation du point de charge, l’arrêt du moteur en navigation, ainsi que les options d’électrification pour la charge, la dynamique de conduite, la climatisation et les systèmes d’échappement, il est déjà prévisible que les performances et réserves énergétiques des systèmes compétitifs 48 V seront limitées.
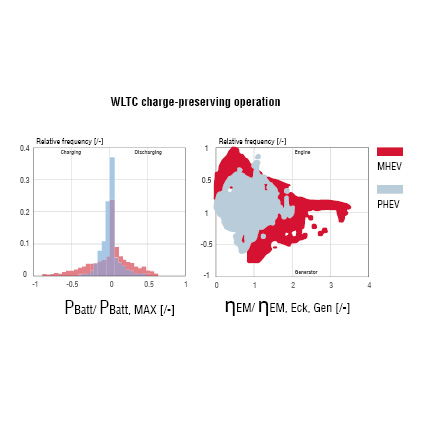
La comparaison avec les systèmes hybrides haute tension de la figure 1 montre que la plage de fonctionnement des systèmes mild hybrides 48 V se rapproche clairement des limites du système. Le nombre croissant de composants 48 V augmente en outre la dynamique des exigences en matière de couple et les variations en termes de stratégie de fonctionnement. Cela s’accompagne d’interactions, de structure dynamiques et d’une grande complexité du système qui poussent les stratégies d’exploitation basées sur les règles au maximum de leurs limites. L’utilisation de la gestion prédictive de l’énergie est très prometteuse, car l’énergie et la puissance électrique disponible sont idéalement réparties dans le réseau de bord 48 V, ce qui permet un fonctionnement idéal des systèmes 48 V conçus pour économiser coûts et ressources.
Un véhicule conceptuel
En coopération avec l’université RWTH d’Aix-la-Chapelle en Allemagne, FEV a développé un concept car mild hybrid 48V. Le véhicule choisi est une Mercedes-Benz AMG A45 équipée des 4 roues motrices et d’une transmission à double embrayage 7 rapports. Le véhicule de série est équipé d’un moteur à essence turbocompressé de 2,0 l d’une puissance spécifique de 133 kW/l. Cette performance impressionnante est obtenue grâce à l’utilisation d’un turbocompresseur (ETC) de grande capacité qui, malgré la technologie twin-scroll, limite considérablement le couple maximal à bas régime et entraîne un sensible retard de réponse. Dans ce contexte, la compression électrifiée et/ou le soutien électrique du couple peuvent améliorer considérablement l’élasticité, en particulier à bas régime. Le groupe motopropulseur mild hybride de 48 V est représenté schématiquement à la figure 2. L’élément principal est l’alterno-démarreur (BSG) relié au moteur à combustion (ICE) par une courroie. La topologie P0 permet une variété de fonctions hybrides telles que la régénération, le changement de point de charge et le support de couple électrique. Comme la puissance maximale pouvant être transmise par la courroie est limitée et qu’il y a une connexion permanente au moteur à combustion, le système ne permet pas de roulage tout électrique.
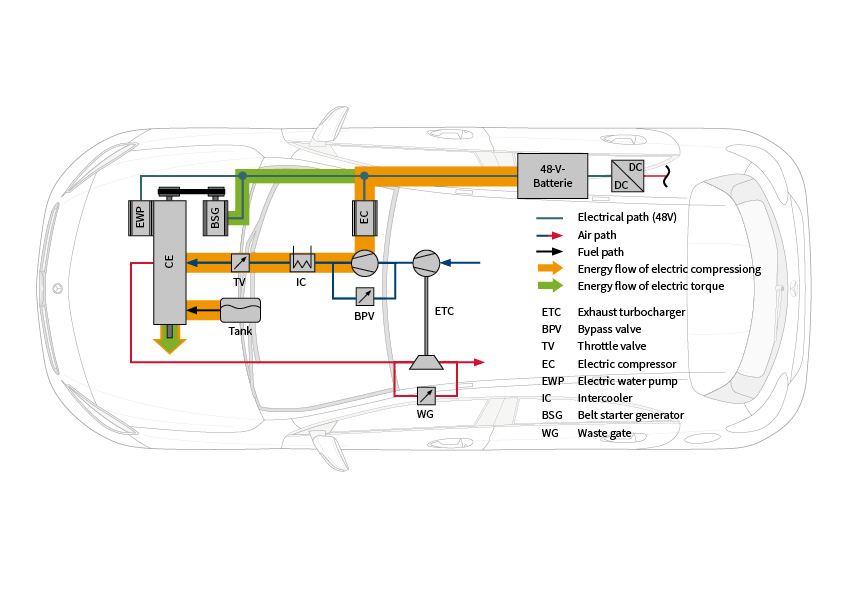
Il y a également un compresseur électrique (EC) positionné dans le circuit d’air de suralimentation, en amont de l’intercooler. L’EC atteint un rapport de pression maximum de 1,45 et peut augmenter de manière significative la compression, et donc diminuer le temps de réponse, dans des plages de fonctionnement à faible enthalpie d’échappement, quelle que soit la condition de fonctionnement du BSG. Le concept car est exploité à l’aide d’un prototypage rapide de contrôle-commande (RCP).
Stratégie opérationnelle.
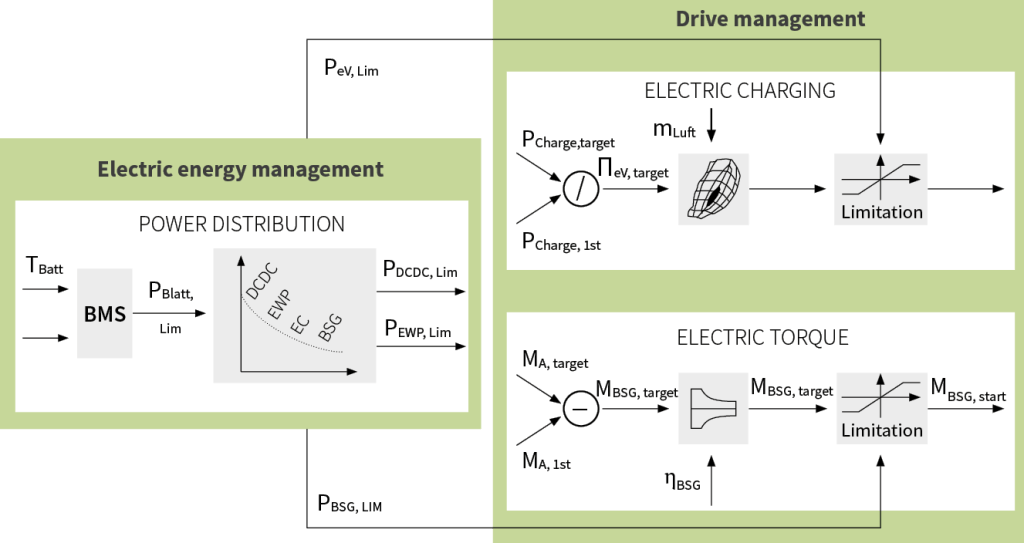
Une stratégie opérationnelle orientée sur les performances de conduite, fondée sur des règles et avec une distribution de puissance basée sur les priorités, contrôle la compression électrique ainsi que le support du couple électrique du BSG (figure 3). La stratégie d’exploitation se compose des fonctions de soutien du couple et de la distribution générale de l’énergie électrique. La charge électrique est contrôlée par le rapport de pression entre la compression souhaitée et la compression actuelle dans le collecteur d’admission. Tant que la pression de suralimentation de l’ETC régulée par la vanne d’évacuation (WG) ne fournit pas la pression de suralimentation souhaitée, la pression est augmentée sur le trajet d’air à travers l’EC. La vitesse de rotation requise est calculée à l’aide du diagramme du compresseur de l’EC, puis limitée en fonction de la puissance électrique disponible.
Contrairement à la compression électrique, dont la puissance d’entraînement résulte de la masse d’air et de carburant supplémentaire, le BSG transforme directement l’énergie électrique en énergie d’entraînement mécanique qui supporte le moteur thermique (figure 2). Le couple requis par le BSG résulte de la différence entre le couple actuel du moteur thermique et les besoins du conducteur. Lorsque la pédale d’accélérateur est enfoncée, cette différence est positive, de sorte que le BSG comble temporairement le déficit de couple. Le couple BSG est alors limité en fonction de la puissance électrique disponible.
Les limites de puissance électrique des différents composants 48 V sont prescrites par la gestion de l’énergie électrique. Lors d’une accélération, la batterie 48 V doit également alimenter la pompe à eau et le réseau 12 V via le convertisseur DC/DC, en plus de l’EC et du BSG. Il est donc nécessaire d’établir un ordre de priorité d’utilisation des composants de 48 V en fonction de la situation. La capacité de décharge disponible de la batterie est, dans ce contexte, prescrite par le système de gestion de la batterie (BMS). La capacité de décharge électrique disponible pour les composants 48 V respectifs est ensuite calculée en fonction de leur priorité et de la consommation électrique réelle des éléments ayant une priorité plus élevée. Afin d’assurer une conduite fiable, le refroidissement du moteur et le réseau 12 V ont une priorité élevée dans ce contexte. La puissance restante est mise à la disposition de l’EC et du BSG en tenant compte d’un rapport de puissance calibrable.
Même si de telles approches fondées sur des règles peuvent être améliorées par d’autres dépendances, leurs principes comportent des inconvénients. Par exemple, la stratégie d’exploitation réagit simplement à l’état actuel du système et ajuste les paramètres indépendamment de l’état de charge attendu. Cependant, comme le comportement temporel de l’augmentation du couple et le rendement dépendent fortement de l’état de charge, de la stratégie de fonctionnement choisie de l’entraînement électrifié (ICE avec ETC, EC et BSG), et des limites du système électrique, ce contrôle est généralement sous-optimal.
Gestion optimisée de l’énergie
La gestion de l’énergie basée sur l’optimisation prédictive utilise les informations dynamiques de l’horizon électronique pour l’optimisation à long terme du guidage routier et de la trajectoire de vitesse (figure 4). Sur la base de ces informations et de systèmes de capteurs adéquats pour la détection de l’environnement, la gestion hybride prend en compte les limites de puissance électrique et la prédiction de charge pour déterminer les stratégies idéales de sélection de vitesse, de couple moteur et de charge pour un horizon à moyen terme. Les valeurs prédites du système permettent également de dériver l’évolution prévisible de l’état de charge de l’accumulateur d’énergie électrique, qui adapte un facteur de pondération de l’énergie. Ce facteur représente l’importance de l’énergie électrique dans le bilan énergétique et influence directement l’optimisation énergétique dans la gestion des entraînements (équation 1).
Equation 1
ETot = ∑N k=0E Chem(kT) + ξE El(kT)
Dans le même temps, le comportement de réponse par la régulation du couple d’entraînement, qui est constitué du couple du moteur thermique et du couple électrique (équation 2), est optimisé tout en respectant les limites dynamiques du système 48V.
Equation 2
ΔMAntrieb = ∑N k=0M Antrieb, Soll (kT) − MVM(kT) − iRiemenMRSG(kT)
Le contrôle prédictif de modèle non linéaire (NMPC) repose sur un modèle temps réel simplifié du groupe motopropulseur mild hybride 48 V. Il fonctionne avec un horizon temporel de quelques secondes et comprend des incréments de temps de l’ordre du centième ou du dixième de seconde pour la représentation de la dynamique non linéaire du système.
Le NMPC calculera l’évolution idéale des paramètres pour le WG et l’EC, qui influencent le couple du moteur thermique par le biais du circuit d’air, ainsi que le couple du BSG, qui peut être obtenu par l’ajout de la distribution. Ainsi, les différences de comportement temporel du circuit d’air de suralimentation et du couple BSG, et leur impact sur le rendement global de la chaîne de traction électrifiée sont pris en compte dans l’optimisation.
Résultats
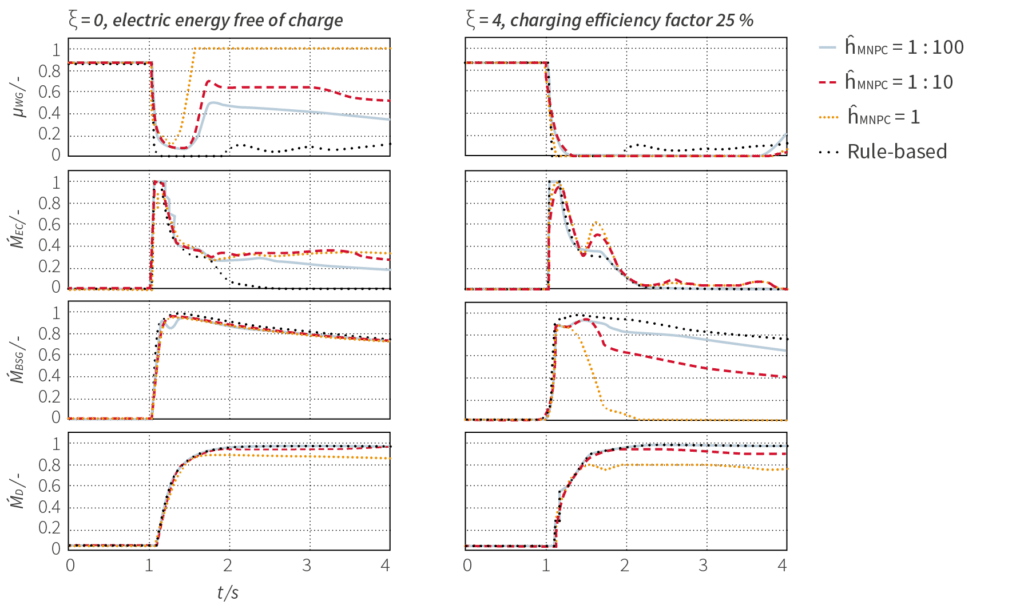
Le NMPC a fait l’objet d’un examen plus approfondi lors d’une co-simulation validée d’un mild hybride 48 V de segment B essence turbocompressé, avec compresseur électrique et BSG (P0). La figure 4 présente une comparaison entre le NMPC et l’approche fondée sur des règles à pleine charge pour divers facteurs de pondération de l’énergie (ξ). Un facteur de pondération énergétique de quatre correspond à un facteur d’efficacité de charge global de 25 %, tandis que l’énergie électrique dans le cas limite de zéro, par exemple en raison d’un état de charge élevé de la batterie et d’une descente prochaine, est gratuite. En raison de l’absence de prévisions, la stratégie d’exploitation basée sur des règles réagit de manière identique dans les deux cas, tandis que le NMPC ajuste les paramètres pour le WG, l’EC et le BSG en fonction de la situation afin d’obtenir un couple d’entraînement souhaité. De plus, la variation des paramètres d’optimisation montre que le NMPC réduit le couple d’entraînement en augmentant la pondération de l’énergie (h˜NMPR ↑), afin de réduire la consommation d’énergie. Si l’énergie électrique est gratuite (ξ=0), le couple d’entraînement est décalé vers le BSG, tandis que le EC accumule la pression de charge avec le WG ouvert, afin de réduire les pertes de charge. A l’inverse, sur ξ = 4, le NMPC n’apporte qu’une aide brève par l’intermédiaire du BSG afin d’utiliser la dynamique rapide de la machine électrique et d’économiser ainsi de l’énergie électrique.
La stratégie opérationnelle, dans un tel scénario d’accélération, est toujours un compromis entre le comportement de réponse et l’efficacité énergétique. Le comportement de réponse est décrit par le temps d’accélération et l’économie d’énergie par l’inverse de l’efficacité effective de l’entraînement. Avec une variation de la limitation de la puissance électrique, les conditions cadres sont modifiées.
De plus, pour chacune de ces trajectoires de puissance, l’ordre de priorité de la stratégie fondée sur des règles et le ratio de pondération de l’optimisation du NMPC étaient variables. Il devient clair que l’augmentation des économies d’énergie se fait au détriment du comportement de réponse. Cependant, le NMPC résout beaucoup mieux le conflit d’objectifs et peut décrire à la fois la consommation d’énergie et les économies d’énergie grâce à l’inverse de l’efficacité effective de l’entraînement. Plus la limitation de la puissance électrique est forte et plus la focalisation sur le comportement de réponse est faible, plus le potentiel du NMPC se développe.
Si vous souhaitez en savoir plus sur les moteurs MILD Hybride de 48V c’est ici. N’hésitez pas à laisser un commentaire ou à partager cet article et à visiter notre site! Merci d’avoir lu cet article et à très bientôt!
Écrit par :
Philip Griefnow
Prof. Jakob Andert
RWTH Université d’Aix-la-Chapelle
Traduit par Maxime Fagon, FEV
